Published
- 10 min read
自作マウスの歩み:ステッピングモータの動作確認とドライバー回路設計
はじめに
自作マウス設計を目標とした、ステッピングモーターの選定から駆動回路の設計、そして動作確認までの取り組みを纏めた。
今回は特に以下の点に焦点を当てている:
- モーター仕様に基づくドライバーの選定
- JLCPCB PCBAサービスを用いたコスト最適化
- 実装時の重要な注意点
- 実際の動作確認
マウスこと「クラシックマウス競技」とは
自立型ロボット(マウス)が、16×16マスの未知の迷路を自立動作して、スタートからゴールまでの「最短通過時間」を競う競技である。日本では1980年より毎年開催される、歴史ある競技である。
ロボットは競技中に人が操作することはできず、自分のセンサーとマイコンを用いて壁を認識し、迷路を解析して最速ルートを駆け抜ける。
私自身は、3年前、2024年の大会で初めてこの競技に参加し、その後は毎年参加をしており全国大会にも参加している。関西地区大会では、特別賞を頂いた実績もある。
大会サイト:公益財団法人ニューテクノロジー振興財団
設計の背景と目的
始まりは、私自身の技術力向上のために設計を始めた。そして学んでいくにつれ、所属する課外活動団体で使用していた教育機体に使用しているパーツがEOL間近(H8マイコンやモータードライバー)となっていることが分かった。次第に可能であれば次世代の教育機体に成りうるものを作り、次の世代の子たちにも私が体験したものづくりの楽しさを伝えたいと思うようになった。
まずは第一歩として、足回りの選定を行った。マウス競技はオリエンタルモーターより提供を受けており、初めて参加する学生には同社製のステッピングモーターが提供される。そのため、このモーターを使用することにした。
ステッピングモーターの仕様
提供いただいたステッピングモーターについて、以下の仕様を確認した:
- モーター型式: PKP242D23A2特注
- 駆動方式: バイポーラ
- 質量:
- ステップ角:
- 電圧:
- 定格電流:
- 最大トルク:
- コイル抵抗:
ドライバーの仕様決定
仕様から決まるドライバーの条件
モーター仕様や電源の要件に基づいて、以下のドライバー要件を決定した:
出力仕様:
- 出力電圧:(電源の要件)
- 出力電流:(各コイルの電流)
- ドライブ方式:バイポーラ
入力仕様:
- ロジック電圧:
- ステップ信号:パルス入力
- 方向信号:HIGH/LOW 制御
ドライバー選定法:JLCPCBを用いたコスト最適化
選定アプローチ
JLCPCB のPCBA部品リストから最適なドライバーICを選定した。
選定条件:
- 出力仕様がモーター要件を満たす
- SMDパッケージ(実装効率&実装の手数料を考慮)
- JLCPCB在庫品(リード時間を最小化)
- 低コスト(複数のオプションから最安を選択)
- PCBAタイプが「Economic」であること(コスト削減のため)
その結果、「DRV8825」を選定した。DRV8825は、最大2.5Aの出力電流を提供し、モーターの要件を十分に満たしていた。
実装時の重要な注意点
次に、基板設計において特に注意すべきポイントを解説する。
1. パターン設計上の注意
パターン幅と許容電流:
- モーター駆動電流([A])に対応するパターン幅を設計
- 一般的に 基板厚さ の場合、あたり約 以上の幅が必要
- 必要に応じてポリゴンを使用して電流容量を確保
- 信号か電源のどちらを優先するかを明確にし、信号線は細く、電源線は太く設計。また、Viaを用いてどちらを回避すべきかを考慮することも重要
参考規格:
- IPC-2152 基準に基づくパターン幅計算
2. 電源・グラウンド設計
駆動電圧とロジック電圧の分離:
- モーター駆動電圧()
- ロジック電圧()
- 異なる電圧系統:完全に分離して設計
- 複数の GND プレーンが存在する場合、必ず一点で接続
3. GND ポリゴンの分割
電位ごとにポリゴンを切り分ける:
- GND_Power: モーター駆動グラウンド
- GND_Logic: ロジック回路グラウンド
- GND_Signal: センサーや信号線のグラウンド
切り分けのルール:
- ポリゴン間は絶対に接続しない(一点接地以外で)
- ポリゴン境界線は大電流経路を避ける
実装例:
[俯瞰図]
┌─────────────────┐
│ GND_Power │ ← モーター駆動グラウンド
│ (ハッチング1) │
├─────────────────┤ ← 境界線(接続なし)
│ GND_Logic │ ← ロジック回路グラウンド
│ (ハッチング2) │
└─────────────────┘
↑
一点接地基板発注は「JLCPCB」
基板発注は、コストと品質のバランスが取れた「JLCPCB」を選択した。特に、PCBAサービスを利用することで、部品実装も一括で依頼できるため、製造プロセスを大幅に簡略化できる点が魅力的であった。
海外のメーカであるが、納期が短く、日本語で発注できるため、安心して利用できる。また、部品の在庫状況もリアルタイムで確認できるため、設計段階からコストと納期を考慮した選定が可能である。
動作確認
テスト計画
実装完了後、以下の項目について動作確認を実施した。
電気特性の測定:
- 各電源電圧の確認()
- ドライバー IC 出力のウェーブフォーム確認
- モーター駆動信号の波形検証
機械的動作確認:
- ステップ信号入力時のモーター回転確認(脱調していないか)
- 方向反転動作の確認
- 複数段階の速度制御動作確認
負荷試験:
- モーター定格電流での連続駆動テスト(5時間)
- 温度上昇の監視(割り込み監視)
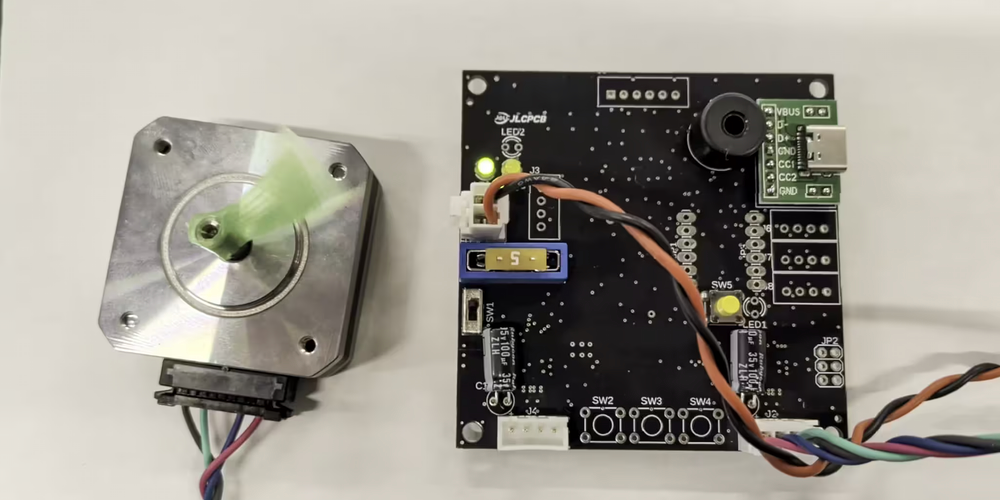
動作結果
ステッピングモーターは、入力信号に対して正確に回転し、脱調も発生しなかった。方向反転も正常に動作し、速度制御も期待通りの結果を得ることができた。
ちなみに、動作確認にはステッピングモーターの共振を利用し「音楽」を演奏させて確認をした。理由としては、私自身音楽が好きということもあるが、脱調といったエラーが発生した場合音程が狂うため、音楽を演奏させることで、モーターの動作状態を直感的に把握できるからである。
実際に動作をさせて感じたことだが、想像していたよりもクリアで透き通った音を奏でていた。今後の課題?としては、振動を拡散させるコーンのようなものを作成して、より音量を大きくしてみたいと思う。
まとめ
本記事では、ステッピングモーターの選定から駆動回路の実装、動作確認までのプロセスについて解説した。
特に電源設計とグラウンド設計は、モーター駆動系の性能に大きな影響を与えるため、基板設計段階において最優先で検討すべき項目である。